Quadrotor Fault Tolerant Control
 A quadrotor flies with 3 propellers.
A quadrotor flies with 3 propellers.
As the most commonly used and simplest multi-rotor drones, quadrotors are especially vulnerable to rotor failures because they lack rotor redundancy. This project aims at introducing novel flight control methods to mitigate the consequence of in-flight motor failures, which rarely happens but is still a big safety threat after large scale deployment of drones in the future.
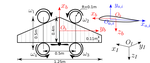
To be specific, the project leverages incremental nonlinear dynamic inversion (INDI) control method, to stabilize and control a quadrotor with failure of a single rotor or two opposing rotors, under significant aerodynamic disturbances. These strong aerodynamic effects are dominant in high-speed flight, or windy conditions. Thanks to the robustness of the INDI controller, the damaged quadrotor maintains controllable in spite of these aeordynamic disturbances.
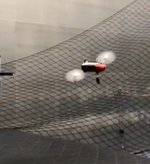
We have validated the proposed controllers in a large scale wind tunnel, named Open Jet Facility at TU Delft. Despite a complete loss of one or two propellers, the tested quadrotor can maintain high-speed flight. In addition to validating the controller, these wind tunnel flight tests have produced valuable data for identifying aerodynamic models of a quadrotor, in both nominal and damaged conditions.
Another focus of the research aims at recovering the damaged quadrotor after motor failure. When a motor failure is detected, a quadrotor might have been entered a detrimental flight condition, such as an upside-down orientation, where the drone can hardly recover to stable flights using the state-of-art methods. Therefore, we have developed an upset recovery controller, using a novel control allocation approach.
Xuerui Wang
Assistant Professor in Aerospace Engineering
Publications
Incremental fault-tolerant control for a hybrid quad-plane UAV subjected to a complete rotor loss
Incremental Nonlinear Fault-Tolerant Control of a Quadrotor With Complete Loss of Two Opposing Rotors
Quadrotor fault-tolerant incremental nonsingular terminal sliding mode control
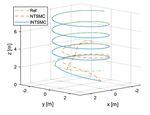
Quadrotor fault tolerant incremental sliding mode control driven by sliding mode disturbance observers

High-speed flight of quadrotor despite loss of single rotor
