 3D trajectory tracking in the presence of uncertainties, disturbances, and successive actuator faults.
3D trajectory tracking in the presence of uncertainties, disturbances, and successive actuator faults.
Abstract
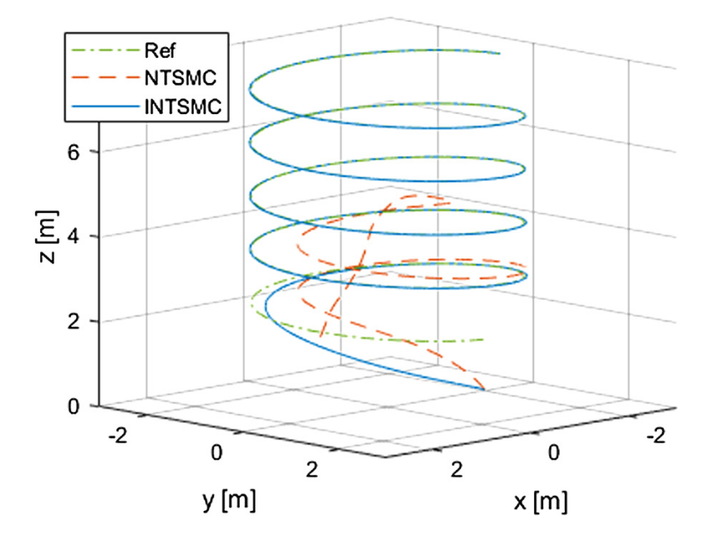
This paper proposes incremental nonsingular terminal sliding mode control for a class of multi-input and multi-output nonlinear systems considering model uncertainties, external disturbances, and sudden actuator faults. This method is free from singularity because it does not involve any negative fractional power. The convergence time in both reaching and sliding phases are proved to be finite. Moreover, by fully exploiting sensor measurements, the proposed incremental control method simultaneously reduces model dependency and the uncertainty remaining in the closed-loop system. The reduction of model dependency simplifies the implementation process and reduces the computational load, while the reduction of uncertainty decreases the minimum possible sliding mode control gains, which is beneficial to chattering reduction. These merits are verified by a quadrotor trajectory tracking problem. Simulation results demonstrate that the proposed method has better robustness against model uncertainties, gusts, and actuator faults than the model-based nonsingular terminal sliding mode control in the literature.