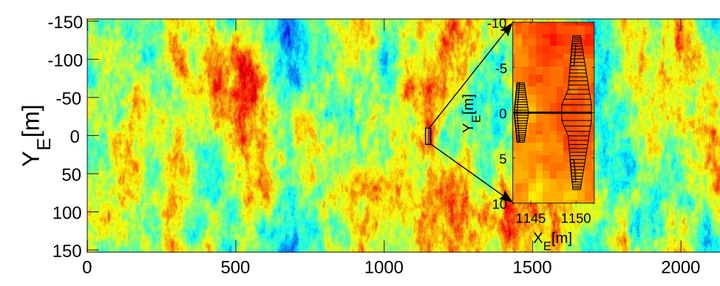
 An aircraft in a two-dimensional von Kármán turbulence field.
An aircraft in a two-dimensional von Kármán turbulence field.
Abstract
As a sensor-based control method, incremental nonlinear dynamic inversion (INDI) has been applied to various aerospace systems and has shown desirable robust performance against aerodynamic model uncertainties. However, its previous derivation based on the time scale separation principle has some limitations. There is also a need for stability and robustness analysis for INDI. Therefore, this paper reformulates the INDI control law without using the time scale separation principle and generalizes it for systems with arbitrary relative degree, with consideration ofthe internal dynamics. The stability of the closed-loop system in the presence of external disturbances is analyzed using Lyapunov methods and nonlinear system perturbation theory. Moreover, the robustness of the closed-loop system against regular and singular perturbations is analyzed. Finally, this reformulated INDI control law is verified by a Monte Carlo simulation for an aircraft command tracking problem in the presence of external disturbances and model uncertainties.