Quadrotor fault tolerant incremental sliding mode control driven by sliding mode disturbance observers
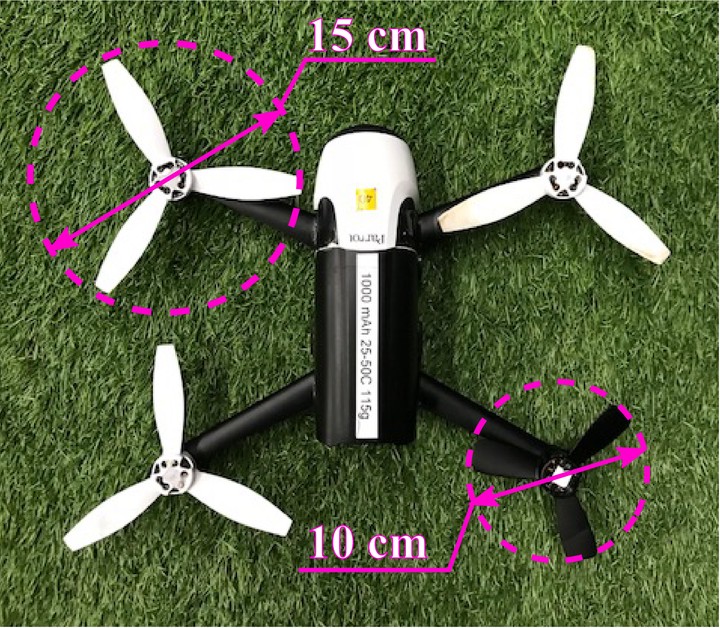 A photo for the damaged quadrotor.
A photo for the damaged quadrotor.
Abstract
This paper proposes an Incremental Sliding Mode Control driven by Sliding Mode Disturbance Observers (INDI-SMC/SMDO), with application to a quadrotor fault tolerant control problem. By designing the SMC/SMDO based on the control structure of the sensor-based Incremental Nonlinear Dynamic Inversion (INDI), instead of the model-based Nonlinear Dynamic Inversion (NDI) in the literature, the model dependency of the controller and the uncertainties in the closed-loop system are simultaneously reduced. This allows INDI-SMC/SMDO to passively resist a wider variety of faults and external disturbances using continuous control inputs with lower control and observer gains. When applied to a quadrotor, both numerical simulations and real-world flight tests demonstrate that INDI based SMC/SMDO has better performance and robustness over NDI based SMC/SMDO, in the presence of model uncertainties, wind disturbances, and sudden actuator faults. Moreover, the implementation process is simplified because of the reduced model dependency and smaller uncertainty variations of INDI-SMC/SMDO. Therefore, the proposed control method can be easily implemented to improve the performance and survivability of quadrotors in real life.