Discrete-time Design and Stability Analysis for Nonlinear Incremental Fault-tolerant Flight Control
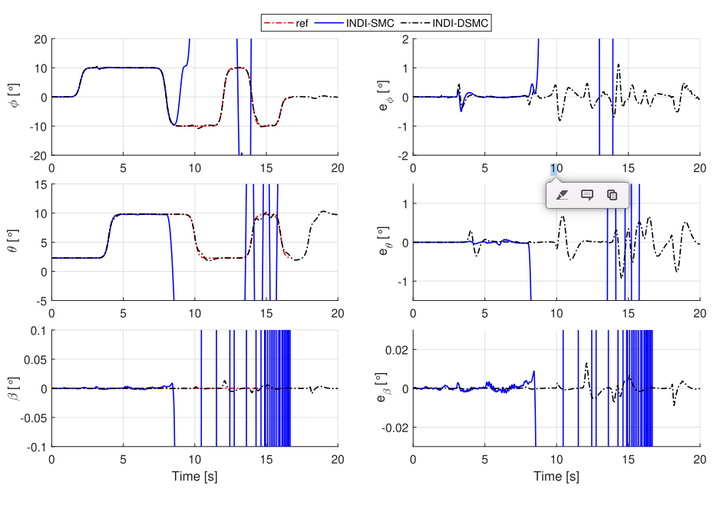 Tracking comparisons.
Tracking comparisons.
Abstract
Incremental control, including incremental nonlinear dynamic inversion (INDI) and incremental backstepping (IBS), is a sensor-based control framework that enhances the control robustness by exploiting sensor measurements. Although its effectiveness has been demonstrated on various aerospace systems, the explicit and quantifiable expression for the ultimate bound of the tracking error, as a function of the sampling frequency and perturbation bound, has not been presented. This issue is addressed by the discrete-time domain stability analysis of the incremental control in this paper, which allows convenient yet realistic performance assessment and parameter tuning before performing real-world flight tests. Another challenge faced by the incremental control is that its stability criterion can be violated in severe aircraft fault scenarios, such as the control reversal. Therefore, this paper proposes a discrete-time control-direction-based incremental sliding mode control, denoted as D-INDI-SMC, which has broader applicability than the state-of-the-art incremental control methods. The robustness of D-INDI-SMC against control reversal, sensing errors, model uncertainties, actuator faults, and structural damage has been theoretically proved and numerically demonstrated.