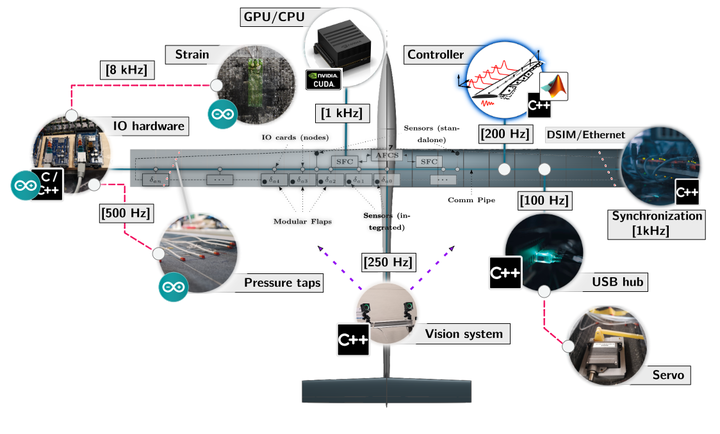
 Morphing SmartX-Neo with a distributed and decentralized control architecture.
Morphing SmartX-Neo with a distributed and decentralized control architecture.
Abstract
This paper has won the Jefferson Goblet Student Paper Award at the AIAA SciTech 2022 conference. This study investigated the design and development of an autonomous aeroservoelastic wing concept with distributed flaps. This wing demonstrator was developed in the scope of the SmartX project, aiming to demonstrate in-flight performance optimization and multi-objective control with over-actuated wing designs. Following a successful test campaign with a previous wing design based on active morphing, this study aims to develop an over-actuated aeroelastic wing design suitable for aeroelastic control, including flutter suppression, maneuver and gust load alleviation. A decentralized control architecture is developed for the over-actuated and over-sensed system, allowing efficient sensing data processing and control algorithms. Aerodynamic and structural analyses are performed to determine actuator torque requirements and actuation mechanism design. Furthermore, buckling analysis is performed to size the wing structure. A state-space aeroelastic dynamic model is established to analyze the gust response and control effectiveness of the wing. It is established that a linear quadratic regulator significantly improves the closed-loop performance. Furthermore, the hypotheses are confirmed that fast actuation improves load alleviation performance and high-frequency disturbance rejection effectiveness. The manufacturing and integration of the wing demonstrator are discussed, which lay a foundation for future static and dynamic wind-tunnel experiments.