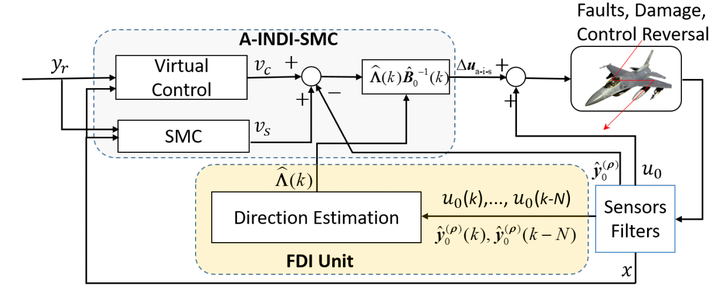
 The control structure of A-INDI-SMC.
The control structure of A-INDI-SMC.
Abstract
Control reversal, indicating the phenomenon that the real control effect is reversed from what is expected, is a challenging problem threatening flight safety. This paper exposes that although some nonlinear fault-tolerant control methods including incremental nonlinear dynamic inversion and incremental sliding mode control can passively resist a wide range of actuator faults and structural damage, their stability both reply on a critical sufficient condition, which is unfortunately violated by control reversal. An active incremental sliding mode control approach is proposed in this paper to solve this issue. It can promptly reconstruct control sign switches in the presence of multi-source faults and uncertainties while avoiding the Zeno behaviour. The stability and robustness of the proposed control are proved in the Lyapunov sense. Moreover, an explicit and quantifiable expression for the ultimate bound of the tracking error as a function of the sampling frequency and perturbation bounds is derived. Furthermore, the theoretical results are verified by numerical simulations of an aircraft tracking problem in the presence of control reversal, parametric model uncertainties, sensing errors, actuator faults, and structural damage.