Nonlinear Incremental Control for Flexible Aircraft Trajectory Tracking and Load Alleviation
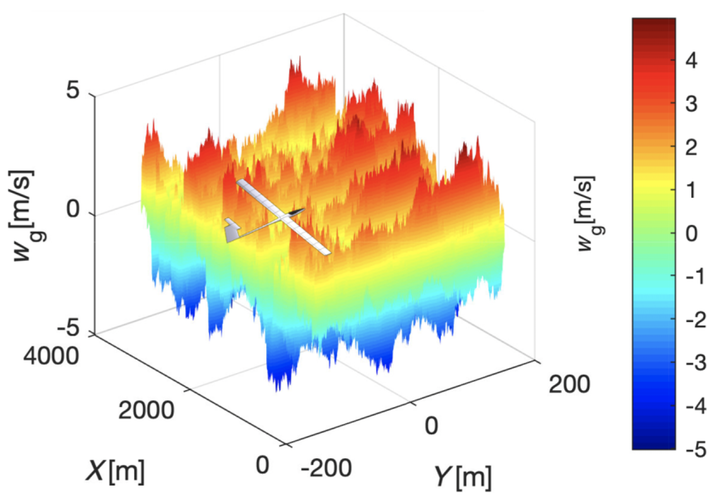 Flexible aircraft trajectory tracking in turbulence field.
Flexible aircraft trajectory tracking in turbulence field.
Abstract
This paper proposes a nonlinear control architecture for flexible aircraft simultaneous trajectory tracking and load alleviation. By exploiting the control redundancy, the gust and maneuver loads are alleviated without degrading the rigid-body command tracking performance. The proposed control architecture contains four cascaded loops position control, flight path control, attitude control, and optimal multi-objective wing control. Because the position kinematics are not influenced by model uncertainties, the nonlinear dynamic inversion control is applied. On the contrary, the flight path dynamics are perturbed by both model uncertainties and atmospheric disturbances; thus the incremental sliding mode control is adopted. Lyapunov-based analyses show that this method can simultaneously reduce the model dependency and the minimum possible gains of conventional sliding mode control methods. Moreover, the attitude dynamics are in the strict-feedback form; thus the incremental backstepping sliding mode control is implemented. Furthermore, a novel load reference generator is designed to distinguish the necessary loads for performing maneuvers from the excessive loads. The load references are realized by the inner-loop optimal wing controller, whereas the excessive loads are naturalized by flaps without influencing the outer-loop tracking performance. The merits of the proposed control architecture are verified by trajectory tracking tasks in spatial von Kármán turbulence fields.