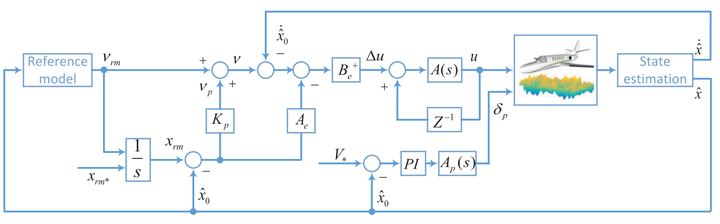
 Flexible aircraft INDI gust load alleviation control law structure.
Flexible aircraft INDI gust load alleviation control law structure.
Abstract
This paper designs an incremental nonlinear dynamic inversion control law for free-flying flexible aircraft, which can regulate rigid-body motions, alleviate gust loads, reduce the wing root bending moment, and suppress elastic modes. By fully exploring the sensormeasurements, the modeldependency ofthe proposed control law can be reduced while maintaining desirable robustness, which simplifies the implementation process and reduces the onboard computational load. The elastic states are observed online from accelerometer measurements, with a Padé approximation to model the pure time delay. Theoretical analyses based on the Lyapunov methods and the nonlinear system perturbation theory show that the proposed control has inherent robustness to model uncertainties, external disturbances, and sudden actuator faults. These merits are demonstrated by time-domain simulations in various spatial turbulence and gust fields, as well as by a Monte Carlo study.