Vision-Based Nonlinear Incremental Control for A Morphing Wing with Mechanical Imperfections
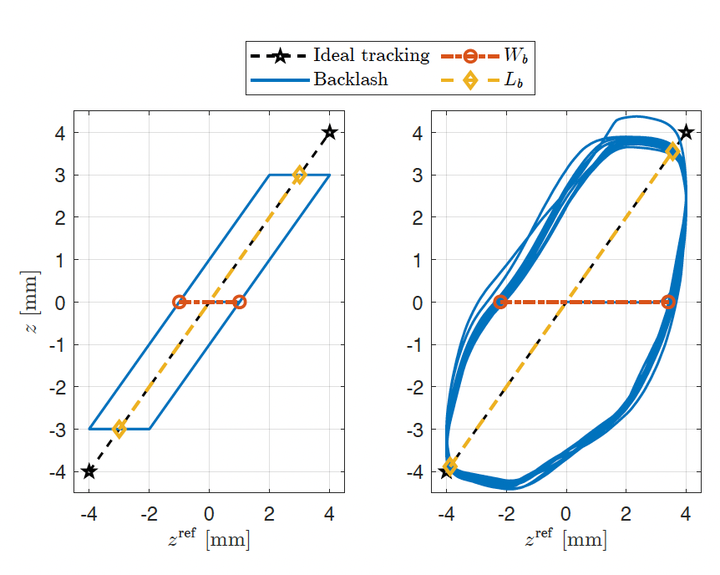 Phase portrait of the plunge motion states.
Phase portrait of the plunge motion states.
Abstract
Morphing structures have acquired much attention in the aerospace community because they enable an aircraft to actively adapt its shape during flight, leading to fewer emissions and fuel consumption. Researchers have designed, manufactured, and tested a morphing wing named SmartX-Alpha, which can actively alleviate loadswhile achieving the optimal lift distribution. However, the widely existing mechanical imperfections can degrade the performance of the morphing wing and even lead to instabilities.To tackle these issues, this article proposes a vision-based adaptive control approach to actively compensate for mechanical imperfections. In this approach, an incremental model is constructed online to identify the system dynamics using servo commands and vision measurements, and then, nonlinear dynamic inversion control is applied based on the identified model. This data-driven control approach with visual feedback has been validated by real-world experiments on the SmartX-Alpha.The results demonstrate that the vision-based system combined with the proposed control methodology can actively compensate for mechanical imperfections with minimal adjustments to the actual system design. Compared to a controller that only uses a feedforward input/output 1 mapping, this proposed approach improves the system performance and decreases the tracking errors by more than 62% despite disturbances. The results collectively demonstrate the effectiveness of the proposed control system, which sets a foundation for realizing morphing in next-generation aircraft.